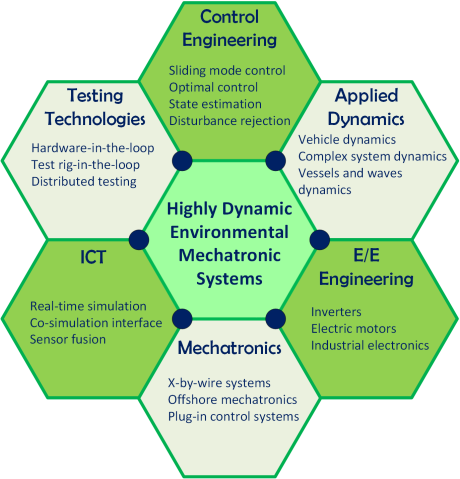
SCOPE
- Higly dynamic environmental mechatronic systems
- Concept of “System of Mechatronic Systems” (SoMS) presented by chain “Electric vehicle – Smart Grids – Renewable energy production”
OBJECTIVES
Research:
- Benchmarking different control and estimation technique applied to mechatronic systems;
- Switching between control strategies under criteria of environmental impact minimization and better energy efficiency;
- Observers and disturbance rejection as applied to highly dynamic mechatronic systems.
Innovation and technologies:
- Development and real-time hardware-in-the-loop validation of plug-in electric vehicle dynamics controller with optimized performance by criteria of energy efficiency, energy harvesting and system safety;
- Development and real-time hardware-in-the-loop validation of robust controllers for mechatronic systems operating for and on the offshore wind-park platforms as smart grid components;
- Advancement of open development platform for model-based design of SoMS.
